Sensor inputs
camera / depth / audio / force / telemetry
Patent-pending observability engine
Haint Engine is a tool-conditioned kinematic inference system for estimating hidden body state when a rigid-body tool obscures the movement that matters.
It is designed for review contexts where the visible signal is incomplete: instrument performance, simulation training, implement mechanics, and equipment-centered ergonomic analysis.
Collect what is visible.
Estimate what is hidden.
Reveal what is at risk.
TECHNICAL PLATE 01
Sensor streams, pose records, tool state, occlusion mapping, inference, and output modules are treated as one embeddable system rather than separate coaching features.
camera / depth / audio / force / telemetry
visible landmark state + confidence
identity / geometry / pose / contact zone
visible / hidden / unreliable landmarks
anatomy + tool + prior trajectory
score / cue / replay annotation
TECHNICAL PLATE 02
The tool creates a volumetric shadow where landmarks become hidden, unstable, or low-confidence. Haint Engine treats those states as inferable, not absent.
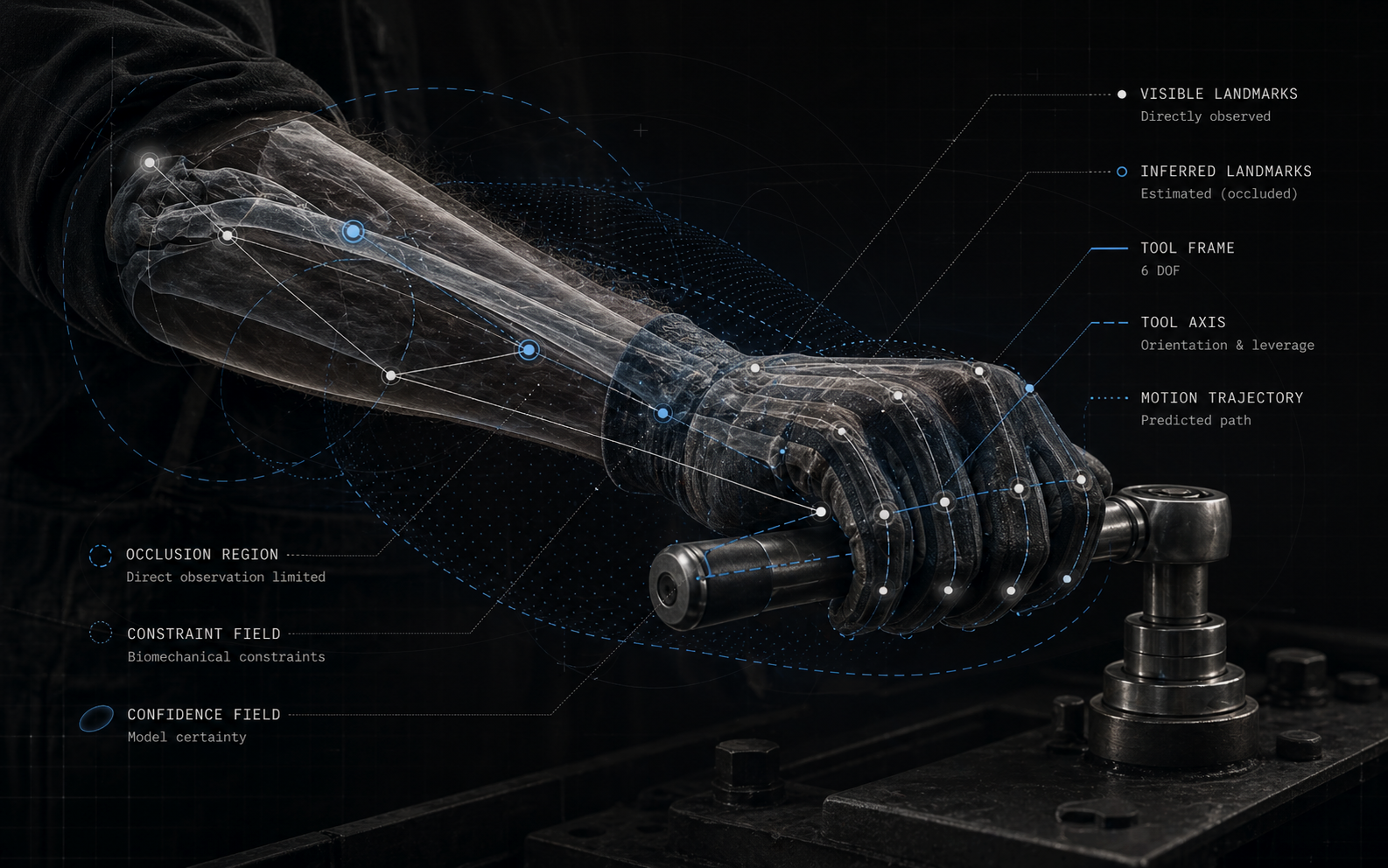
Observed points remain tied to the skeletal chain and become constraints for hidden-state estimation.
Low-confidence points are not discarded; they are marked as unstable evidence inside the frame buffer.
The tool shadow assigns likely cause, contact region, and candidate landmark positions.
Tool identity, axis, pose, and contact zones narrow the hidden-state search space.
TECHNICAL PLATE 03
Candidate hidden-joint positions are reduced by body-segment lengths, joint limits, prior trajectory, and tool-contact plausibility.
segment length / joint range / skeletal continuity
axis / contact zone / leverage / rigid-body pose
prior trajectory / velocity envelope / frame history
impact / audio transient / force spike / task marker
| State | Score | Status | Constraint result |
|---|---|---|---|
| A | 0.81 | accepted | consistent with tool axis and prior frame |
| B | 0.46 | review | joint range plausible; contact zone weak |
| C | 0.18 | reject | violates segment continuity |
The accepted estimate is not a guess from a missing landmark. It is the remaining candidate after anatomical, tool, temporal, and event constraints remove less plausible states.
TECHNICAL PLATE 04
A detected event at t=0 can trigger review of preceding biometric frames to identify a likely pre-event movement condition.
visible chain stable
wrist angle begins closing
tool axis diverges from prior path
transient marker detected
impact / audio transient / force spike
pre-event biometric sequence
visible + inferred state replay
likely pre-event condition
APPLICATION INDEX
The architecture is not tied to one profession, instrument, or training environment. It is designed to support domains where a body acts through a tool: observe visible state, constrain hidden state, and return a reviewable event record.
Instrument-relative movement economy, skeletal tension, finger travel, wrist alignment, and pre-event misalignment before the audible result.
Tool-path review linked to inferred wrist, elbow, shoulder, and torso state during simulation, training, or post-session analysis.
Hidden joint state during bat, club, racket, stick, paddle, barbell, or other implement interaction.
Tool-relative posture, force direction, and ergonomic review signals while operating equipment or training around a fixed tool frame.

The musical embodiment is where the general architecture takes on a public-facing form. Haint Blue applies the same tool-conditioned inference model to guitar necks, keyboard planes, bow paths, drumsticks, and other instrument geometries.
Audio events can be synchronized with inferred body landmarks to review likely finger travel, wrist position, shoulder tension, pre-event misalignment, or movement economy before an audible result. Haint Blue carries the musician-facing language; Haint Engine remains the patent-pending technical architecture underneath it.
DOCUMENT CONTROL
Public pages introduce the architecture. White sheets, technical notes, and embodiment-specific materials should be shared through a request path so claim scope, audience, and patent posture remain controlled.
System framing, observability problem, and core inference model.
Available by requestSensor state, tool-state frame, occlusion map, and output-layer structure.
Available by requestHow a domain-specific application inherits the generalized Engine architecture.
Available by requestUse the inquiry path for technical review, licensing, research, partnership, or embodiment discussions.
Open Inquiry Docket

